Robots autónomos para la cartografía de áreas, la vigilancia y la detección in situ
Explorando el futuro de la robótica: Proyecto ARAMMIS

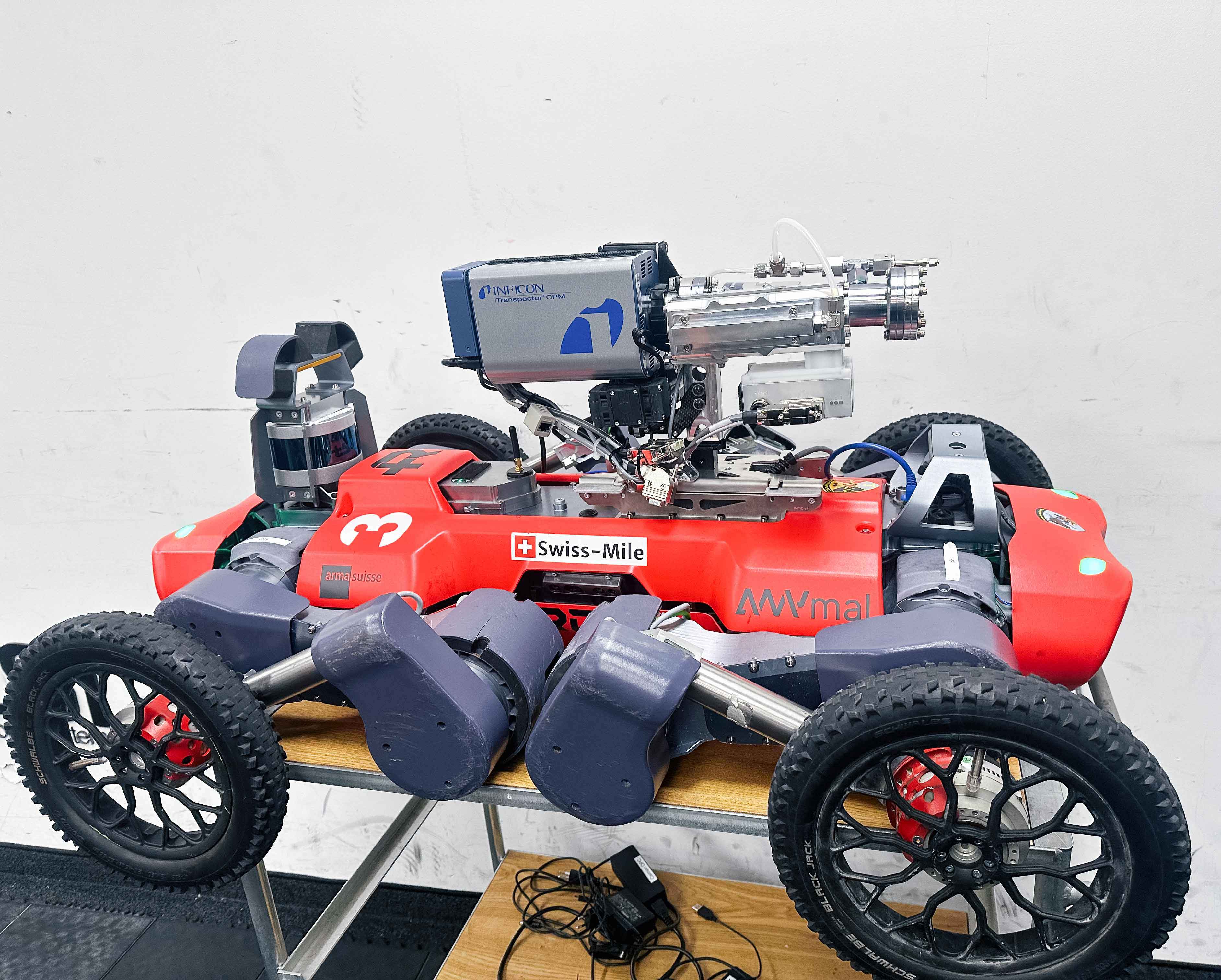
En colaboración con el Laboratorio de Sistemas Robóticos de la ETH de Zúrich, estamos trabajando en un proyecto denominado ARAMMIS - Robots autónomos para el mapeo de áreas, la monitorización y la detección in situ. Nuestro objetivo es integrar nuestras cargas útiles avanzadas de detección de gases en el robot con ruedas y piernas. El objetivo es claro: adentrarnos en el mundo de los robots autónomos, mejorando sus capacidades para cartografiar gases con nuestros sensores y proporcionar valiosa información en tiempo real sobre un entorno hostil sin arriesgar vidas humanas.
Integración del espectrómetro de masas en el robot
Hemos logrado un gran hito en el proyecto ARAMMIS: la integración con éxito de nuestro espectrómetro de masas Transpector® MPH con el robot cuadrúpedo de ruedas para proporcionar a los robots capacidades de detección de gases in situ y de mapeo de la concentración de gases El robot y el espectrómetro de masas funcionaron primero de forma independiente, sin comunicación. El siguiente reto conseguido fue la creación de un sistema totalmente integrado en el que el robot y el espectrómetro de masas pudieran comunicarse a la perfección.


Comunicación entre el robot y nuestro espectrómetro de masas
Para solventar la carencia de comunicación, desarrollamos PUMA (Python Utility for Mass Analysis). Este algoritmo implementado facilita la comunicación entre el ordenador del robot y nuestro espectrómetro de masas. Los ingenieros del Laboratorio de Sistemas Robóticos de la ETH pueden entonces introducir las muestras de datos en el sistema operativo de los robots, que está construido sobre el marco del Sistema Operativo de Robots (ROS). Este logro representa un hito importante en nuestro camino, que nos acerca a un sistema totalmente sincronizado y autónomo. Ahora estamos trabajando en la visualización en directo de las concentraciones de gas y en el despliegue del sistema integrado en misiones sobre el terreno.

Espectrómetro de masas más ligero y pequeño
Reconociendo la necesidad de una solución más ágil, asumimos el reto de crear versiones más ligeras y pequeñas de nuestros sistemas comerciales de espectrómetros de masas. Nuestro objetivo era diseñar un espectrómetro de masas compacto que ocupara menos espacio. Tras rigurosos esfuerzos e iteraciones, hemos finalizado dos versiones: un sistema portátil de campo basado en nuestro sistema comercial Transpector® CPM y Transpector APX pero diseñado para aplicaciones desplegables sobre el terreno y funcionamiento autónomo y una versión más ligera, diseñada inicialmente para aplicaciones de drones y vehículos aéreos no ocupados (UAV) ya que utiliza una robusta turbobomba en miniatura, una cámara de vacío de aluminio más ligera y una bomba de desbaste más pequeña. Ya hemos implementado las modificaciones en nuestros sistemas portátiles, lo que sienta las bases para realizar pruebas exhaustivas que incluyen demostraciones sobre el terreno.
Mirando hacia el futuro: Robótica más allá de las fronteras
A medida que avanzamos, nuestra visión se extiende más allá de los robots terrestres. Pretendemos utilizar la misma bahía de carga útil para aplicaciones robóticas en drones. Esta expansión a plataformas aéreas añade una nueva dimensión a la versatilidad de nuestra tecnología, prometiendo posibilidades pioneras en diversos dominios. Esperamos con impaciencia los apasionantes desarrollos que nos esperan y seguimos trabajando en sistemas autónomos.
¿Está interesado en colaborar con nosotros?
Háganos saber si busca una solución en un entorno difícil y desafiante o si desea colaborar en alguno de nuestros proyectos.
Más información sobre nuestros proyectos de investigación

Visión general de los proyectos de investigación con socios como la NASA y la ETH de Zúrich sobre la tecnología del futuro. Nos esforzamos por hacer avanzar la innovación y superar los límites tecnológicos.

Una colaboración con la Universidad de Rhode Island

Como expertos en detección de gases y mediciones de vacío en muchos sectores, incluidos el de los semiconductores, la energía y la seguridad, nuestros equipos siempre están buscando "lo siguiente" en innovación.